Das neue Robotic Refueling Experiment (RRM) der NASA ist ein revolutionäres Technologie-Demonstrationsgerät, das von der letzten Shuttle-Mission in die Luft gebracht wurde. Es wird testen und beweisen, ob vorhandene erdumlaufende Raumschiffe, die niemals gewartet werden sollten, erfolgreich betankt und robotergesteuert repariert werden können.
Die RRM-Nutzlast ist ein hochmodernes Pfadfindungsexperiment, das aufregende neue Wege der stationären wissenschaftlichen Forschung eröffnet, die möglicherweise die Lebensdauer von umlaufenden kommerziellen, staatlichen und militärischen Satelliten im Wert von Milliarden von Dollar retten und verlängern könnten.
RRM wurde von der vierköpfigen Besatzung der STS-135, dem großen Finale des Shuttles, an die Internationale Raumstation (ISS) geliefert. Das Projekt ist eine gemeinsame Anstrengung der NASA und der Canadian Space Agency (CSA).
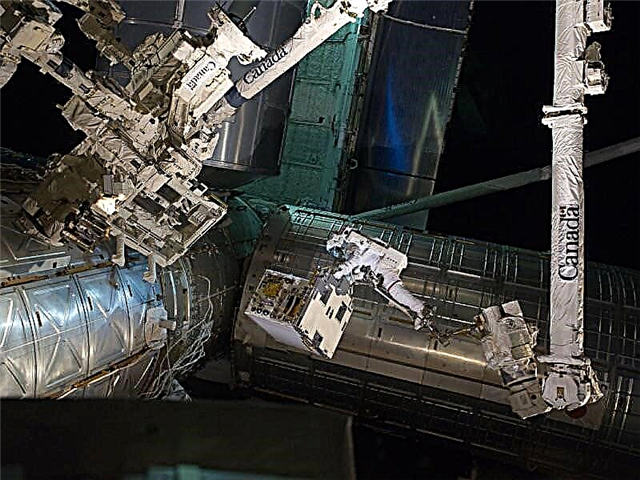
Während des letzten Weltraumspaziergangs der Space-Shuttle-Ära wurde RRM vorübergehend von den US-Astronauten Mike Fossum und Ron Garan auf einer Plattform des Dextre-Roboters installiert - dem Special Purpose Dexterous Manipulator - der als „Handwerker“ im Weltraum fungiert.
Dextre ist ein zweiarmiger Roboter von CSA, der ebenfalls eine Schlüsselkomponente des Experiments darstellt, da er die Durchführung von Reparatur- und Wartungsaufgaben im Mittelpunkt des RRM-Experiments ermöglicht.

Die Einheit in Waschmaschinengröße wiegt 500 Pfund und wurde in der Nutzlastbucht des Space Shuttle Atlantis verstaut und für die einfache Fahrt in den Weltraum an den Lightweight Multipurpose Carrier (LMC) angeschlossen.
Nach dem Abflug von Atlantis wird RRM an einen permanenten Befestigungspunkt am Fachwerk der Station übertragen und auf dem Exterior Logistics Carrier 4 (ELC-4) des umlaufenden Außenpostens in Millionen Pfund montiert.
Laut Justin Cassidy, RRM-Hardware-Manager bei der NASA Goddard Spaceflight, ist RRM die erste derartige Technologiedemonstration der NASA, mit der die Machbarkeit von Wartungsarbeiten im Orbit auf Satelliten getestet werden soll, die nach dem Abflug in den Weltraum nicht mehr bearbeitet und gewartet werden konnten Zentrum in Greenbelt, Maryland.
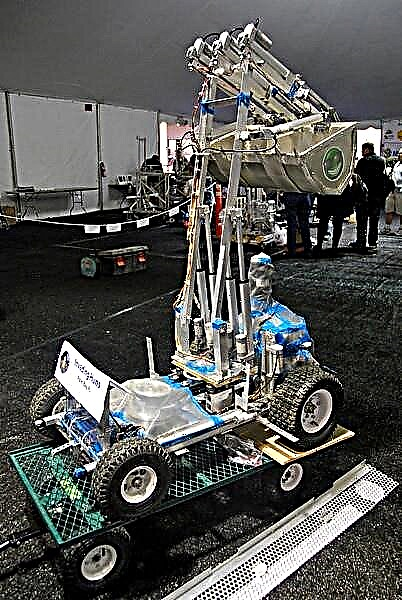
Die RRM-Box simuliert sowohl den zu wartenden Satelliten als auch die Wartungstechniken, die für die Durchführung von Roboterbetankungs- und Reparaturarbeiten erforderlich sind.

"Der Dextre-Roboter wird vier speziell entwickelte" Werkzeuge "manipulieren, die in Buchten im RRM gespeichert sind", sagte Cassidy in einem Interview im Kennedy Space Center.
Cassidy verwendete ein High-Fidelity-RRM-Modell mit dem Spitznamen „Rosie“, das auf der Presseseite des Kennedy Space Center ausgestellt war, und sprach mit mir ausführlich über die RRM-Mission und -Ziele.
Die vier einzigartigen RRM-Tools sind Teil der Hubble-Wartungsmissionen und wurden bei der NASA Goddard entwickelt. Das Werkzeug zur Manipulation von Drahtschneidern und Decken, das Multifunktionswerkzeug, das Werkzeug zum Entfernen der Sicherheitskappe und das Düsenwerkzeug.
"Dextre wird die Werkzeuge greifen und mit den Händen bewegen, um Tank- und Wartungsarbeiten an Aktivitätsplatinen und simulierten Satellitenkomponenten durchzuführen, die an den Außenwänden des RRM angebracht sind", sagte Cassidy. "Die Aktivitätskarten können in Zukunft ausgetauscht werden, um neue Experimente durchzuführen."

Die RRM-Zuweisung markiert die erste Verwendung von Dextre über die routinemäßigen Wartungsarbeiten an Bord der ISS hinaus. Tatsächlich ist das Forschungsprojekt, das mit RRM zusammenarbeitet, eine neue F & E-Funktion, die über das hinausgeht, was ursprünglich für Dextre geplant und vorgesehen war, sagte Mathieu Caron, CSA Mission Operations Manager.
Zu den für RRM geplanten Aufgaben gehören das Bearbeiten und Bearbeiten von Kappen, Ventilen und Schrauben in verschiedenen Formen und Größen, das Schneiden von Drähten, das Einstellen von Heizdecken und das Umfüllen von Flüssigkeiten um Kraftstoffbehälter. Ethanol wird verwendet, um den Fluss von Hydrazin-Kraftstoff zu simulieren, sagte Cassidy.
"RRM wird von Fluglotsen vor Ort bei der NASA Goddard, dem Marshall Space Flight Center in Huntsville, Alabama, und auch in Kanada von der Canadian Space Agency betrieben", erklärte Cassidy.
Jedes RRM-Werkzeug ist mit integrierten Kameras ausgestattet, in denen sechs eingebaute LEDs untergebracht sind, damit die Bodensteuerungen die Werkzeuge präzise führen können.
"Die RRM-Experimentierphase zur Demonstration des Betankungs- und Wartungsvorgangs von Robotern auf der ISS soll zwei Jahre dauern und möglicherweise zehn oder mehr Jahre dauern", sagte Cassidy.
Präsident Obama fragte die STS-135-Besatzung während eines Telefonanrufs des Oval Office vom Weißen Haus zur ISS nach dem RRM-Experiment. Sehen Sie sich Obamas Telefonanruf auf YouTube an
Die NASA hofft, dass die geringe Investition in die Demonstration der RRM-Technologie den Weg für fortschrittliche Folgemissionen und die private Entwicklung von kommerziellen Betankungs- und Wartungsfahrzeugen für Roboter - in nicht allzu ferner Zukunft - ebnen wird, die Kosteneinsparungen und Dividenden in Milliardenhöhe einbringen werden.





Lesen Sie meine Artikel über die Final Shuttle-Mission STS-135:
Wasserwerfer Salute Trompeten Wiederherstellung der Last Shuttle Solid Rocket Booster - Fotoalbum
Shuttle Atlantis fliegt ein letztes Mal ins All: Fotoalbum
Atlantis für historischen Endflug bei stürmischem Wetter enthüllt
Countdown bis zum letzten Shuttle; Stürmisches Wetter projiziert
Atlantis Crew Jets nach Florida am Unabhängigkeitstag für Final Shuttle Blastoff
Die NASA legt den 8. Juli für das obligatorische Space Shuttle Grand Finale fest
Final Shuttle Voyagers führen Countdown-Übungen am Florida Launch Pad durch
Letzte Nutzlast für den letzten Shuttle-Flug, der an die Startrampe geliefert wird
Last Ever Shuttle fährt zum Launch Pad; Fotogallerie
Atlantis wird zum letzten Mal vertikal
Atlantis rollt zum Fahrzeugmontagegebäude mit der endgültigen Space-Shuttle-Crew für den 8. Juli Blastoff