Update: Das Analog-1-Experiment war ein voller Erfolg! Der Astronaut Parmitano hat alle Anforderungen innerhalb des angegebenen Zeitrahmens (eine Stunde) erfüllt. Dieser Test ist der erste Schritt zur Validierung der Teleoperationstechnologie.
Die NASA war ziemlich offen über ihren Wunsch, Astronauten in den kommenden Jahren zurück zum Mond und weiter zum Mars zu schicken. Zu ihnen gesellen sich mehrere Weltraumagenturen (wie die ESA, Roscosmos, die CNSA und die IRSO), die auch ihre ersten Missionen mit Besatzung außerhalb der Erde durchführen möchten. Was jedoch oft übersehen wird, ist die Rolle, die teleoperierte Missionen in naher Zukunft spielen werden - wo Menschen und Roboter Hand in Hand erforschen.
Zum Beispiel hat die ESA eine Reihe von Experimenten mit dem gemeinsamen Namen Analog-1 gestartet, bei denen Astronauten Roboter vom Weltraum aus steuern. Gestern (18. November) hat der ESA-Astronaut Luca Parmitano von der ISS die Kontrolle über einen Roboter in den Niederlanden übernommen. Dieses und ähnliche Experimente werden dazu beitragen, Astronauten auf zukünftige Missionen vorzubereiten, bei denen gefährliche oder unzugängliche Umgebungen außerhalb der Welt erkundet werden.
Der Rover (bekannt als Interact) wurde im Rahmen des METERON-Projekts (Multi-Purpose End To End Robotics Operations Network) entwickelt, mit dem Kommunikationsnetzwerke, Roboterschnittstellen und Hardware erstellt werden sollen, damit Astronauten Roboterforscher aus dem Orbit fernsteuern können. Diese Roboter werden in der Lage sein, Landeplätze für zukünftige Missionen ausfindig zu machen, Ressourcen zu lokalisieren und Lebensräume für Astronauten vorzubereiten.

Der Schlüssel zu diesem Prozess ist ein speziell entwickeltes „Weltraum-Internet“, das einen Bediener mit Orten in einer Entfernung von bis zu 10.000 km verbinden kann - entweder zwischen der Umlaufbahn und der Oberfläche oder an entfernten Orten auf der Erde. Diese Verbindung ermöglichte es Luca, mit dem Rover in Kontakt zu bleiben sowie alles zu sehen und zu fühlen, was er erlebte - wenn auch mit zeitlicher Verzögerung.
Dies ist für die Teleoperation von entscheidender Bedeutung, da Explorationsziele so weit von der Erde entfernt sind. Um einen Mondrover fernsteuern zu können, müssen sich Missionsleiter mit Verzögerungen auseinandersetzen, die Sekunden oder Minuten lang sind. Von der Erde zum Mond brauchen Signale nur wenige Sekunden, um dorthin und zurück zu gelangen. Bei Missionen zum Mars kann die Verzögerung jedoch zwischen 4 und 24 Minuten liegen (je nachdem, wo Erde und Mars in Beziehung zueinander stehen).
Bei herkömmlichen Verbindungen können Missionscontroller letztendlich nur Befehle senden und im Gegenzug Daten empfangen. Das METERON-Projekt hingegen ermöglicht es den Steuerungen, zu sehen und sogar zu fühlen, was der Roboter trotz Zeitverzögerung tut. Die Steuerung erfolgt über zwei Laptops und einen Sigma7-Joystick mit Force-Feedback und sechs Bewegungsgraden. Mit diesem haptischen Joystick kann der Controller erleben, was der Rover selbst aus seiner Umgebung wahrnimmt.
Das Verbinden des Rovers und des Bedieners ist keine einfache Aufgabe, da die Signale der ISS eine Hin- und Rückfahrt von etwa 144.400 km (89.725 mi) ergeben. In der Zwischenzeit bewegt sich die ISS mit einer Geschwindigkeit von 29.000 km / h um die Erde. Diese Signale werden an eine Reihe von Satelliten gesendet, die sich in Umlaufbahnen von bis zu 36.000 km (22.370 mi) von der Oberfläche befinden.

Die Signale werden dann zu einer US-Bodenstation in New Mexico, zu Houston der NASA und dann über ein transatlantisches Kabel nach Europa übertragen. All dies führt zu einer erheblichen Zeitverzögerung, die jedoch dank der fortschrittlichen Infrastruktur der NASA, der ESA und anderer Partneragenturen beherrschbar ist.
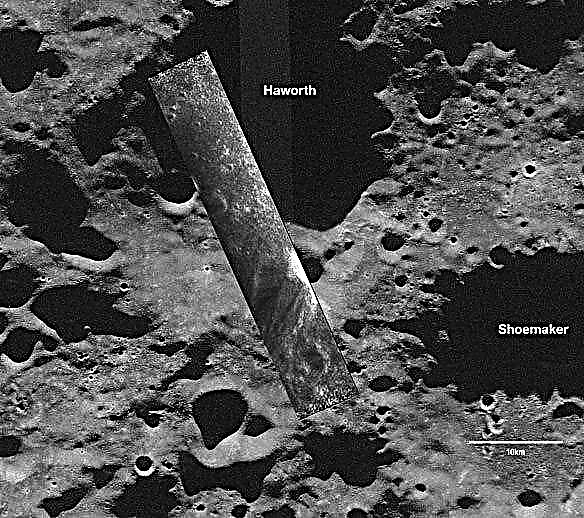
In den ersten Sitzungen fuhr Luca den Interact Rover durch einen Hindernisparcours in einem Hangar in Valkenburg in den Niederlanden - in der Nähe des Europäischen Wissenschaftsforschungs- und Technologiezentrums (ESTEC) der ESA. Um den Kurs herum wurden Kulissen mit Mondlandschaften platziert, die aus einer Reihe von Kegeln bestanden, die auf dem Boden platziert wurden, um den Regolith des Mondes zu simulieren.
Das ultimative Ziel ist es, diese Art der Fernbedienungserkundung von Stationen wie dem Lunar Gateway oder dem Mars Base Camp aus durchzuführen. Diese Stationen und die Fähigkeit, Rover an der Oberfläche zu teleoperieren, sind ein Schlüsselaspekt für die Schaffung einer nachhaltigen menschlichen Präsenz auf dem Mond und die Durchführung von Erkundungsmissionen mit Besatzung zum Mars - auch bekannt als. NASAs Mond-Mars-Plan.
Der nächste Schritt im Analog-1-Experiment besteht aus einer Simulation, die in etwa einer Woche stattfinden soll und eine vollständig simulierte Mondumgebung umfasst. Mit diesem Test wird bewertet, ob ein von Menschen betriebener Roboter geologische Untersuchungen und Erkundungen schwer zugänglicher Orte durchführen kann.

Ein Team des Europäischen Astronautenzentrums (EAC) in Köln wird als Wissenschaftsteam fungieren und das Experiment überwachen. Um die Illusion einer Mondmission zu vervollständigen, werden sie Luca über mögliche Forschungsziele informieren und beraten, einschließlich der Frage, ob die simulierten Mondgesteine, auf die der Interact Rover trifft, weitere wissenschaftliche Analysen verdienen oder verworfen werden sollten.
Ähnliche analoge Experimente werden von Ingenieuren in Deutschland durchgeführt, die das METERON-System zur Steuerung eines Rovers in Kanada verwenden. Diese Experimente validieren nicht nur die hoch entwickelte Technologie. Sie demonstrieren auch den Wert der Zusammenarbeit zwischen Mensch und Roboter im Weltraum - die in zukünftigen Explorationsplänen eine zentrale Rolle spielen wird.
In der Zwischenzeit werden Minister aus den Mitgliedstaaten der ESA Ende dieses Monats (27.-28. November) im Space19 + in Sevilla, Spanien, zusammentreten, um die wissenschaftlichen Ziele der Agentur für die Zukunft zu erörtern. Angesichts der Bedeutung von Teleoperationen und der dahinter stehenden Technologie werden METERON und die analogen Experimente mit Sicherheit auftauchen!
Schauen Sie sich unbedingt dieses Video des teleoperierten Interact-Rovers an: