Wenn Sie sich die hochauflösenden HiRISE-Bilder des Mars Reconnaissance Orbiter angesehen haben oder die Gelegenheit hatten, den neuen Google Mars zu erkunden, wissen Sie, dass der Mars voller Krater, Berge, Schluchten und allerlei interessantem und gefährlichem Gelände ist . Bereiche wie diese mit geschichteten Ablagerungen, Sedimenten, Brüchen und Verwerfungen sind genau die Orte, an denen nach Methanquellen gesucht werden kann, die auf dem Mars produziert werden. Es ist jedoch viel zu riskant, unseren aktuellen Rover-Stil, einschließlich des Mars Science Laboratory (MSL) 2011, in tückisches Terrain zu schicken. Ingenieure von JPL haben zusammen mit Studenten des California Institute of Technology einen vielseitigen Roboter mit geringer Masse entwickelt und getestet, der größeren Rovers wie MSL hinzugefügt werden kann, die sich von Klippen abseilen, flink über steiles und felsiges Gelände fahren und erkunden können tiefe Krater.
Dieser Prototyp-Rover namens Axel könnte zukünftigen Roboter-Raumfahrzeugen helfen, fremde Welten wie den Mars besser zu erforschen und zu untersuchen. Auf der Erde könnte Axel bei Such- und Rettungsaktionen behilflich sein.
"Axel erweitert unsere Fähigkeit, Gebiete zu erkunden, die wir in der Vergangenheit nicht erkunden konnten, wie z. B. tiefe Krater mit vertikal geneigten Vorgebirgen", sagte Axels Hauptforscherin Issa A.D. Nesnas von JPLs Abteilung für Robotik und Mobilität. „Da Axel eine relativ geringe Masse aufweist, kann eine Mission eine Reihe von Axel-Rovers befördern. Das würde uns die Möglichkeit geben, aggressiver mit dem Terrain umzugehen, das wir erkunden würden, und gleichzeitig das Gesamtrisiko überschaubar zu halten. “
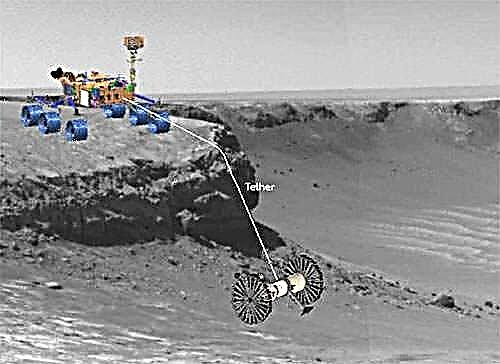
Nesnas sagte, Axel sei wie ein Jojo - es befindet sich an einem Haltegurt, der an einem größeren Rover befestigt ist, und kann an den Seiten von Kratern, Schluchten und Schluchten auf und ab gehen und Regionen erkunden, die für andere Rover nicht sicher sind.

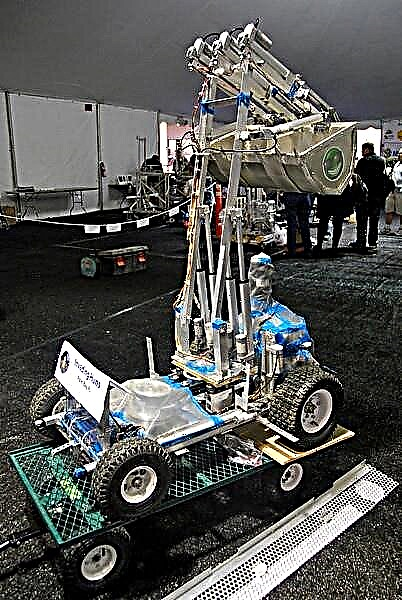
Das einfache und elegante Design von Axel, das sowohl verkehrt herum als auch richtig herum betrieben werden kann, verwendet nur drei Motoren: einen zur Steuerung der beiden Räder und einen dritten zur Steuerung eines Hebels. Der Hebel enthält eine Schaufel zum Sammeln von Mond- oder Planetenmaterial, das Wissenschaftler untersuchen können, und stellt auch die beiden Stereokameras des Roboters ein, die um 360 Grad geneigt werden können.

Der zylindrische Körper von Axel verfügt über Computer- und drahtlose Kommunikationsfunktionen sowie einen Trägheitssensor für einen autonomen Betrieb. Es hat auch eine Leine, die Axel abwickeln kann, um von einem größeren Lander, Rover oder Ankerpunkt abzusteigen. Der Rover kann verschiedene Radtypen verwenden, von großen faltbaren Rädern bis zu aufblasbaren Rädern, die dem Rover helfen, eine harte Landung zu tolerieren und felsiges Gelände zu bewältigen.
Axel ist seit 1999 in der Entwicklung und Studenten von Caltech, der Purdue University und der Arkansas Tech University haben im Laufe der Jahre mit JPL zusammengearbeitet, um diesen vielseitigen Rover zu entwickeln.
Weitere Informationen zu Axel finden Sie auf der Axel-Seite von JPL und auf der Axel-Website von Caltech.