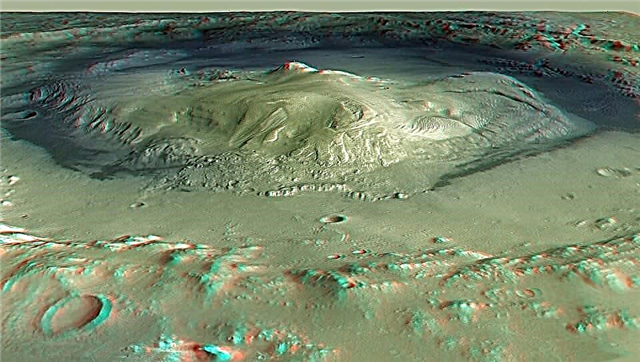
Bildnachweis: NASA / JPL
Die am Mast montierten Kameras an Bord der Mars Exploration Rovers, Spirit and Opportunity bieten die bisher beste Sicht auf die Oberfläche des Roten Planeten. Ihre Kameras können um 90 Grad nach oben und unten schwenken und vollständig um 360 Grad schauen. Der erste Rover, Spirit, wird am 3. Januar auf dem Mars eintreffen, und die Gelegenheit wird am 25. Januar eintreffen.
Die von der Cornell University entwickelte, am Mast montierte Panoramakamera namens Pancam an Bord der Rover Spirit and Opportunity bietet die klarsten und detailliertesten Marslandschaften, die jemals gesehen wurden.
Die Bildauflösung - entspricht einer Sicht von 20/20 für eine Person, die auf der Marsoberfläche steht - ist dreimal höher als die, die 1997 von den Kameras der Mars Pathfinder-Mission oder Mitte der 1970er Jahre von den Viking Landers aufgezeichnet wurde.
Aus einer Entfernung von 10 Fuß hat Pancam eine Auflösung von 1 Millimeter pro Pixel. "Es ist der Mars, wie Sie ihn noch nie gesehen haben", sagt Steven Squyres, Cornell-Professor für Astronomie und Hauptforscher für die Reihe wissenschaftlicher Instrumente, die von den Rovers getragen werden.
Spirit soll am 3. Januar um 23.35 Uhr auf dem Mars landen. EUROPÄISCHE SOMMERZEIT. Die Gelegenheit wird am 25. Januar um 12:05 Uhr EST aufsetzen.
Das Jet Propulsion Laboratory (JPL) in Pasadena, eine Abteilung des California Institute of Technology, verwaltet das Mars Exploration Rover-Projekt für das NASA-Büro für Weltraumforschung in Washington, D. C. Cornell, in Ithaca, New York, und verwaltet die wissenschaftlichen Instrumente der Rover.
Pancams Mast kann die Kamera um 360 Grad über den Horizont und um 90 Grad nach oben oder unten schwenken. Wissenschaftler kennen die Ausrichtung eines Rovers jeden Tag auf der Marsoberfläche, indem sie Daten verwenden, die bei der Suche und Suche der Sonne am Himmel zu einer bekannten Tageszeit gewonnen wurden. Wissenschaftler werden den Standort eines Rovers auf dem Planeten bestimmen, indem sie die Positionen von Merkmalen am fernen Horizont in verschiedene Richtungen triangulieren.
James Bell, Mitglied des Rover-Wissenschaftsteams, Associate Professor für Astronomie bei Cornell und leitender Wissenschaftler bei Pancam, sagt, dass eine hohe Auflösung für die Durchführung von Wissenschaft auf dem Mars wichtig ist. „Wir wollen feine Details sehen. Vielleicht gibt es Schichten in den Felsen, oder die Felsen werden aus Sedimenten anstelle von Vulkanen gebildet. Wir müssen die Steinkörner sehen, ob sie windgeformt oder von Wasser geformt sind “, sagt er.
Pancam ist auch wichtig für die Festlegung der Reisepläne eines Rovers. Bell sagt: "Wir müssen Details möglicher Hindernisse sehen, die in der Ferne weit entfernt sein können."
Während jede CCD-Kamera (Charge Coupled Device) mit zwei Linsen Bilder aufnimmt, werden die elektronischen Bilder für eine Reihe von Bildverarbeitungsschritten, einschließlich Komprimierung, an den Bordcomputer des Rovers gesendet, bevor die Daten zur Erde gesendet werden.
Jedes Bild, das auf nichts anderes als einen Strom von Nullen und Einsen reduziert ist, ist Teil eines ein- oder zweimal täglichen Informationsstroms, der zur Erde gestrahlt wird. Diese Reise dauert 10 Minuten. Die Daten werden vom Deep Space Network der NASA abgerufen, an die Missionscontroller von JPL geliefert und in Rohbilder umgewandelt. Von dort werden die Bilder an die neue Mars-Bildverarbeitungsanlage im Cornell Space Sciences Building gesendet, wo Forscher und Studenten über Computern schweben, um wissenschaftlich nützliche Bilder zu erstellen.
Während der Oberflächenaktivität der Rover von Januar bis Mai 2004 wird das wissenschaftliche Team des Mars unter der Leitung von Squyres täglich umfangreiche Planungen durchführen. Die Forschungsspezialisten Elaina McCartney und Jon Proton werden an diesen Treffen teilnehmen und entscheiden, wie die Pläne für Pancam und die fünf anderen Instrumente jedes Rovers umgesetzt werden sollen.
Die Verarbeitung von Bildern aus einer Entfernung von 100 Millionen Meilen ist keine leichte Aufgabe. Es dauerte drei Jahre, bis die Cornell-Fakultät, Mitarbeiter und Studenten die Pancam-Linsen, -Filter und -Detektoren präzise kalibriert und die Software geschrieben hatten, die der speziellen Kamera mitteilt, was zu tun ist.
Zum Beispiel haben die Forscher Jonathan Joseph und Jascha Sohl-Dickstein Software geschrieben und perfektioniert, die Bilder von großer Klarheit erzeugt. Eine von Josephs Softwareroutinen fügt die Bilder zu größeren Bildern zusammen, die als Mosaike bezeichnet werden, und eine andere bringt Details in einzelnen Bildern hervor. Mit der Software von Sohl-Dickstein können Wissenschaftler Farbbilder erstellen und Spektralanalysen durchführen, was für das Verständnis der Geologie und Zusammensetzung des Planeten wichtig ist.
Umfangreiche Arbeiten an der Kamera wurden auch von den Cornell-Absolventen Miles Johnson, Heather Arneson und Alex Hayes durchgeführt. Hayes, der im zweiten Jahr als Cornell an der Mars-Mission arbeitete, erstellte ein Modell der Panoramakamera, das die feine Farbkalibrierung und Berechnung der Brennweite und des Sichtfelds der tatsächlichen Mars-Kamera unterstützte. Johnson und Arneson verbrachten acht Monate bei JPL damit, Pancam unter marsähnlichen Bedingungen zu betreiben und Kalibrierungsdaten für die 16 Filter der Kamera zu sammeln.
Für die Studenten und Absolventen des Pancam-Teams war die Forschung sowohl wertvolle Erfahrung als auch Bildung. „Ich stand in einem Reinraum im Jet Propulsion Laboratory und führte Tests an den echten Rovers durch“, sagt Johnson. "Es war ein seltsames, aber aufregendes Gefühl, neben einem so komplexen Gerät zu stehen, das bald auf dem Mars sein würde."
Ursprüngliche Quelle: Cornell University